






















|
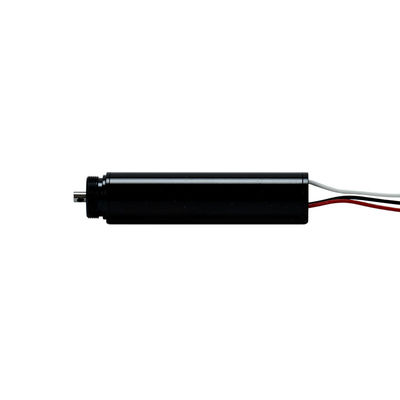
Moteur électrique sans balais 14mm 24V 40000rpm haute puissance BLDC sans cogging
Détails sur le produit:
| Lieu d'origine: | Chine |
| Nom de marque: | PM |
| Certification: | CE, ROHS |
| Numéro de modèle: | PM1456C |
Conditions de paiement et expédition:
| Quantité de commande min: | 300 |
|---|---|
| Prix: | 18-85 US$ |
| Détails d'emballage: | boîte de carton forte à l'extérieur, mousse polyester à l'intérieur |
| Délai de livraison: | 20 jours ouvrables |
| Conditions de paiement: | Je peux vous aider. , T/T |
| Capacité d'approvisionnement: | 90000pcs par mois |
|
Détail Infomation |
|||
| Type de moteur: | Moteur sans pinceau sans noyau sur mesure | Diamètre de moteur: | 14 mm |
|---|---|---|---|
| Longueur du corps moteur: | 56mm | Voltage nominal: | 24V, 48V ou sur mesure |
| Pas de charge Vitesse: | 40000 tours par minute ou 35000 tours par minute ou sur mesure | Nombre de paires de pôles du rotor du moteur: | 1 |
| Type de roulement: | Type de roulement à billes silencieux à faible courant | Matériel d'aimant: | NdFeB |
| Puissance maximale de sortie: | 102.9W | ||
| Mettre en évidence: | Moteur BLDC de 24 V,Moteur BLDC 40000 tr/min,Moteur électrique sans balais 14mm |
||
Description de produit
![]()
Modèle : Moteur électrique sans balais de 14 mm, 24 V, 40 000 tr/min, moteur BLDC haute puissance, moteur sans cogging
Applications typiques :
1. Mises en œuvre aérospatiales et de défense
• Systèmes satellitaires
Les moteurs sans balais sans encoche servent de composants essentiels dans les sous-systèmes des engins spatiaux, en particulier dans les mécanismes de direction des antennes à réseau phasé. Leur fonctionnement sans cogging garantit une précision d'alignement inférieure à la minute d'arc pour les réseaux de communication en espace lointain.
• Technologie de propulsion des drones
Les architectures de propulsion des UAV modernes intègrent largement des moteurs sans balais sans encoche, tirant parti de leur rapport couple/inertie élevé (supérieur à 4,5 N·m/kg) pour des ajustements rapides du vecteur de poussée lors des manœuvres d'évitement d'obstacles autonomes.
2. Applications de la technologie médicale
• Systèmes de chirurgie robotique
Ces moteurs permettent une résolution de positionnement submicronique dans les manipulateurs chirurgicaux, ce qui est essentiel pour les tâches de microchirurgie comme les procédures de vitrectomie ophtalmique nécessitant <10 µm de suppression des tremblements.
• Intégration de l'imagerie diagnostique
Dans les systèmes de positionnement compatibles IRM, les entraînements sans balais sans encoche atteignent une précision de mouvement linéaire de 50 nm grâce au contrôle de la commutation sinusoïdale, éliminant les interférences métalliques avec les champs magnétiques de 7 T.
3. Solutions de fabrication industrielle
• Contrôle d'usinage de précision
Les configurations d'axes de broche CNC utilisent des moteurs sans balais sans encoche pour maintenir une répétabilité de positionnement de ±0,8 µm pendant les opérations de fraisage à grande vitesse (jusqu'à 40 000 tr/min), ce qui est crucial pour la fabrication de composants en titane de qualité aérospatiale.
• Systèmes d'emballage automatisés
Intégrés dans les unités de prélèvement et de placement robotiques, ces moteurs atteignent une précision de synchronisation de 0,1 ms grâce aux protocoles de communication EtherCAT, ce qui permet un débit de 200 ppm (pièces par minute) dans les lignes d'emballage sous blister pharmaceutiques.
4. Plateformes de mobilité robotique
• Actionnement articulaire anthropomorphique
Les robots humanoïdes utilisent des moteurs sans balais sans encoche avec une résolution angulaire de 0,02 ° dans les poignets articulés, reproduisant la dextérité humaine pour des tâches complexes comme la manipulation d'objets à plusieurs doigts.
• Robotique de service autonome
Les roues omnidirectionnelles des robots de livraison intègrent des moteurs-roues sans balais sans encoche offrant un rendement de pointe de 92 %, ce qui permet un fonctionnement continu de 8 heures avec une capacité de charge utile de 50 kg dans les environnements d'entrepôt.
Données techniques du moteur :
| Série PM1456C | Unité | 001 | ||
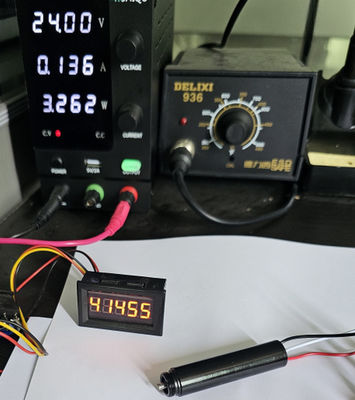
| 1 | Tension nominale | V | 24 | |
| 2 | Couple de décrochage | mNm | 98 | |
| 3 | Courant de décrochage | A | 17 | |
| 4 | Vitesse à vide | tr/min | 40000 | |
| 5 | Courant à vide | A | 0,22 | |
| 6 | Vitesse nominale | TR/MIN | 30200 | |
| 7 | Courant nominal | A | 4,36 | |
| 8 | Couple nominal | mNm | 24,06 | |
| 9 | Puissance de sortie nominale | W | 76,14 | |
| 10 | Rendement à la charge nominale | % | 72,6 | |
| 11 | Résistance de la borne | Ohm | 1,40 | |
| 12 | Constante de force contre-électromotrice | V/KRPM | 0,60 | |
| 13 | Rendement maximal | % | 80 | |
| 14 | Coefficient de couple | mNm/A | 5,72 | |
| 15 | Constante de vitesse | tr/min/V | 1666 | |
| 16 | Puissance de sortie maximale | W | 102,9 | |
| 17 | Vitesse angulaire | rad/s | 4188 | |
| Informations complémentaires | ||
| ● | nombre de paires de pôles du rotor | 1 |
| ● | Nombre de phases | 3 |
| ● | Plage de températures de fonctionnement | -40℃... +150℃ |
| ● | Classe d'isolation | Classe F |
| ● | Les paramètres du moteur et la taille de l'arbre peuvent être fabriqués selon la demande du client. | |
| ● | Options : boîte de vitesses | |
Schéma du moteur (mm)
![]()